#LaboratoriaPrzyszłości#LaboratoriaPrzyszłości
@LaboratoriaPrzyszłości
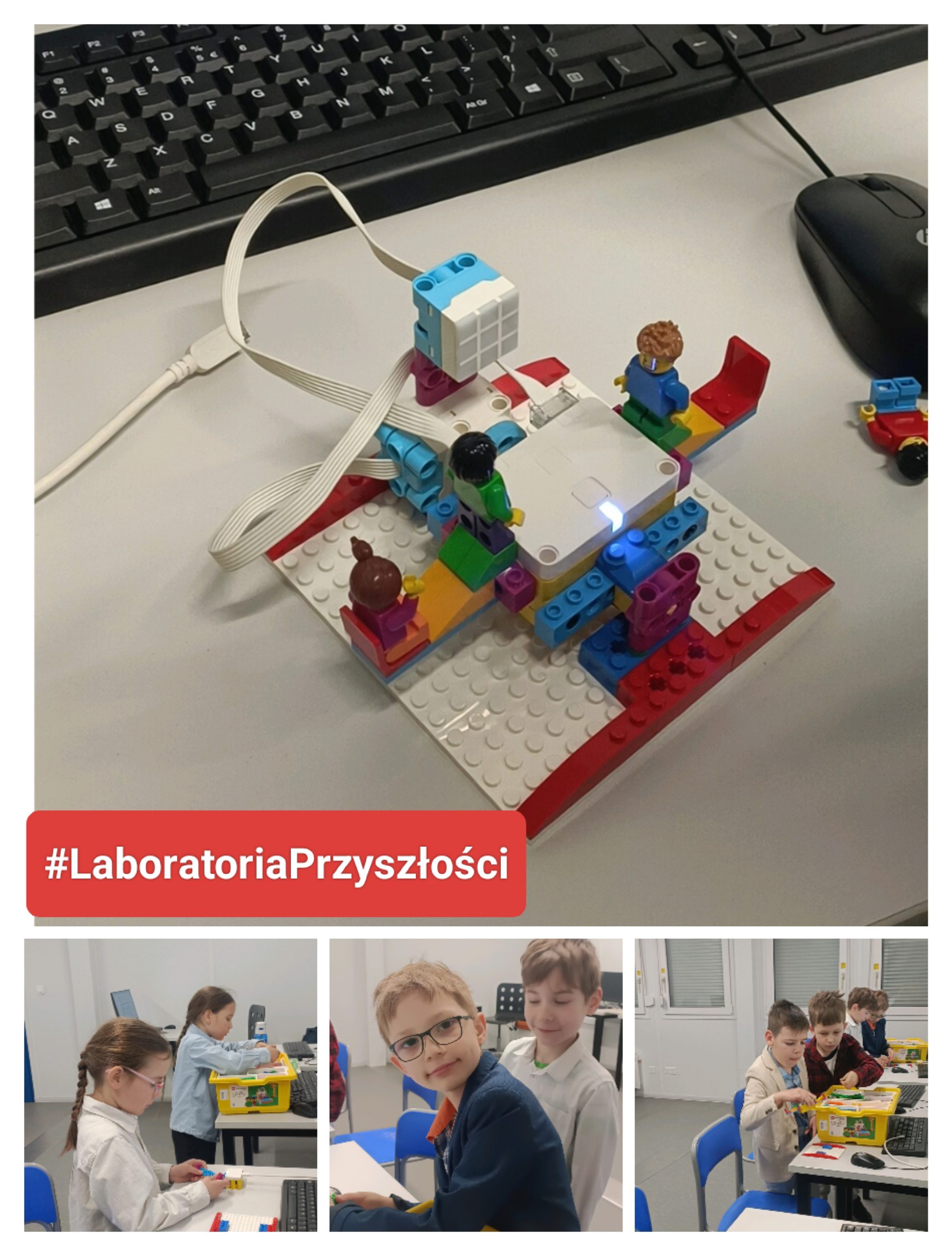
W maju realizowaliśmy kolejne działania w ramach programu Laboratoria Przyszłości. Uczniowie rozwinęli swoje umiejętności STEAM.
Zrealizowaliśmy następujące projekty:
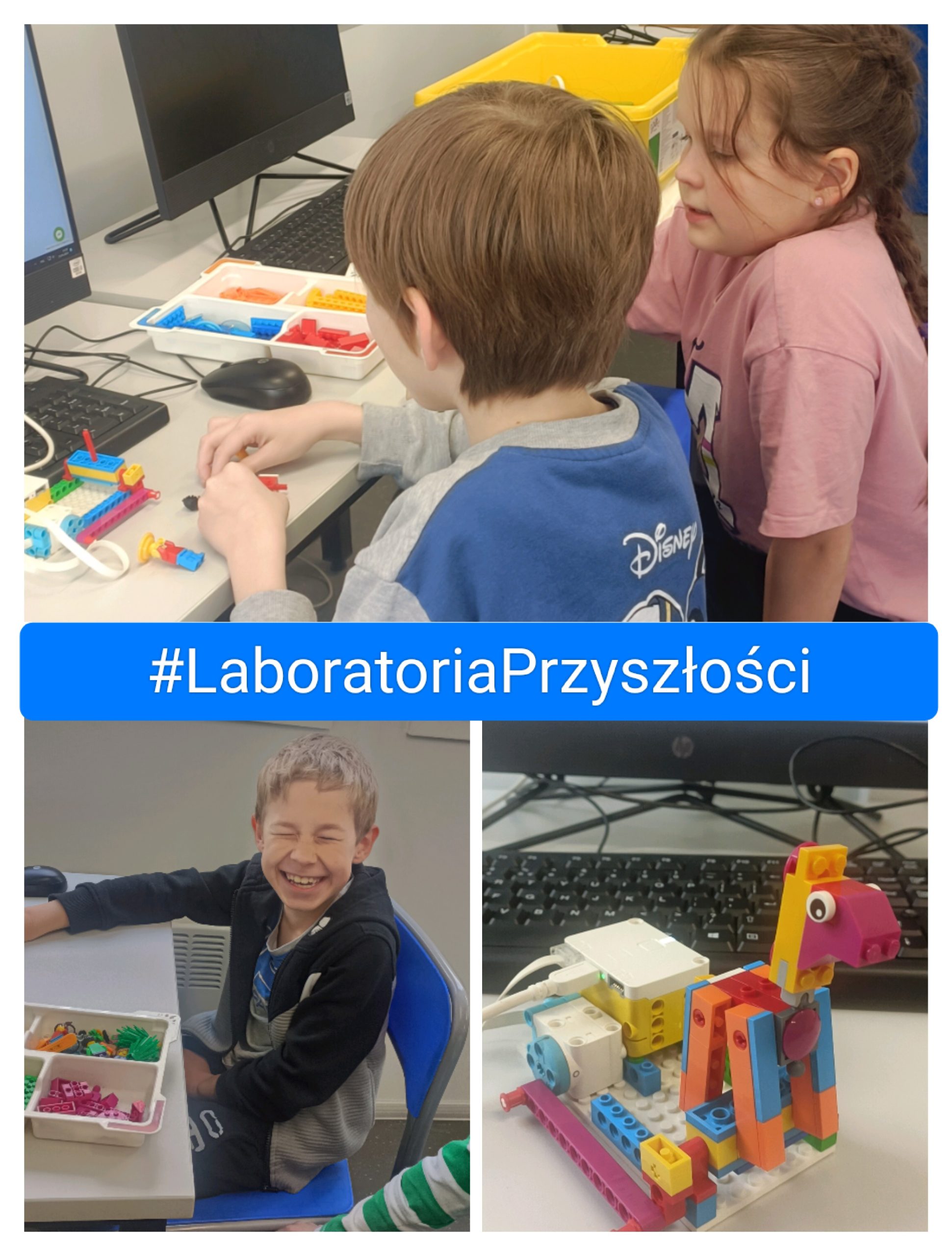
Mikromysz
Uczniowie z klasy drugiej zbudowali mikromysz, która zawierała dwa rodzaje elementów elektronicznych: silniki i HUB. Zadaniem robota było pokonanie labiryntu. Wymagało to dużej precyzji w sterowaniu ruchem.
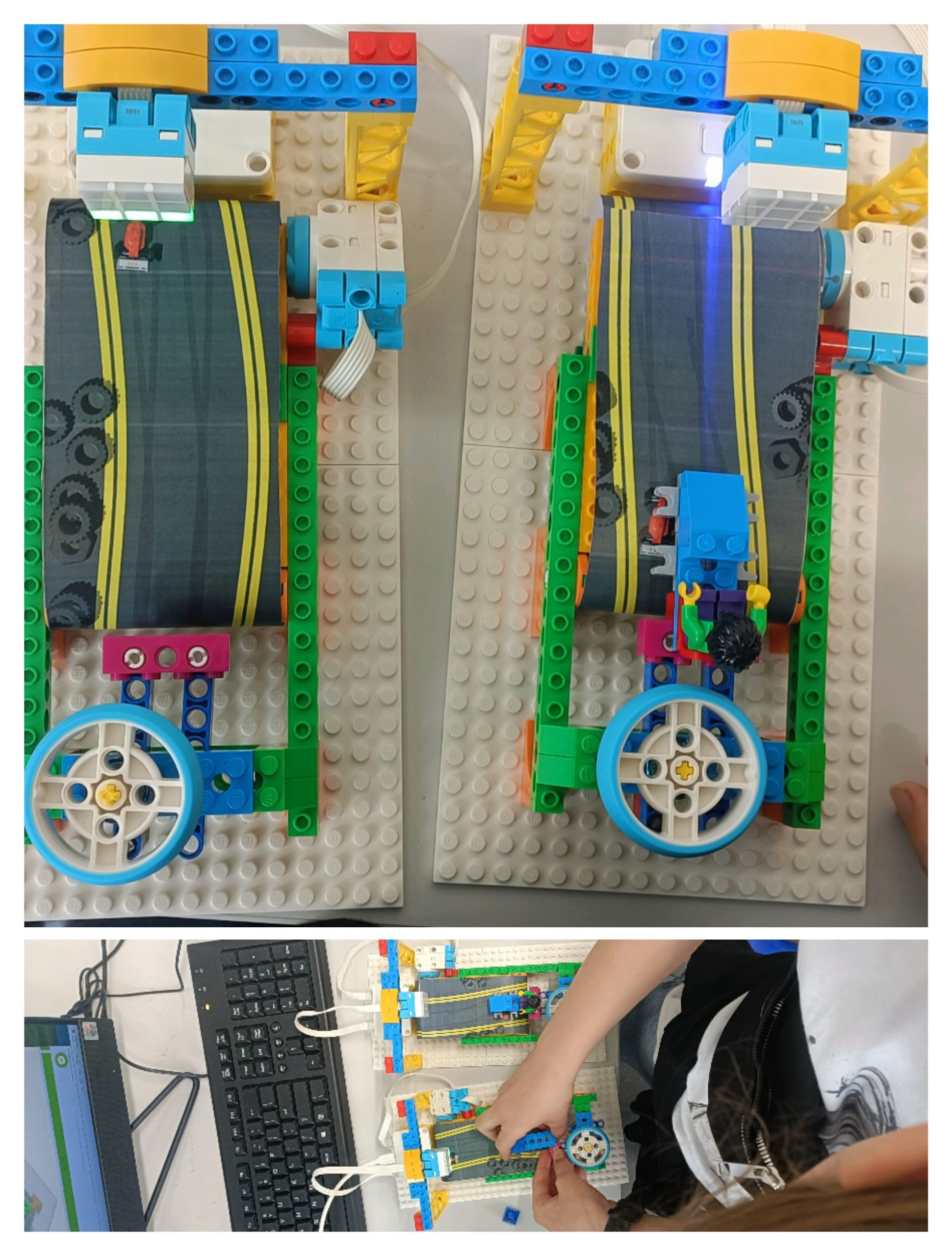
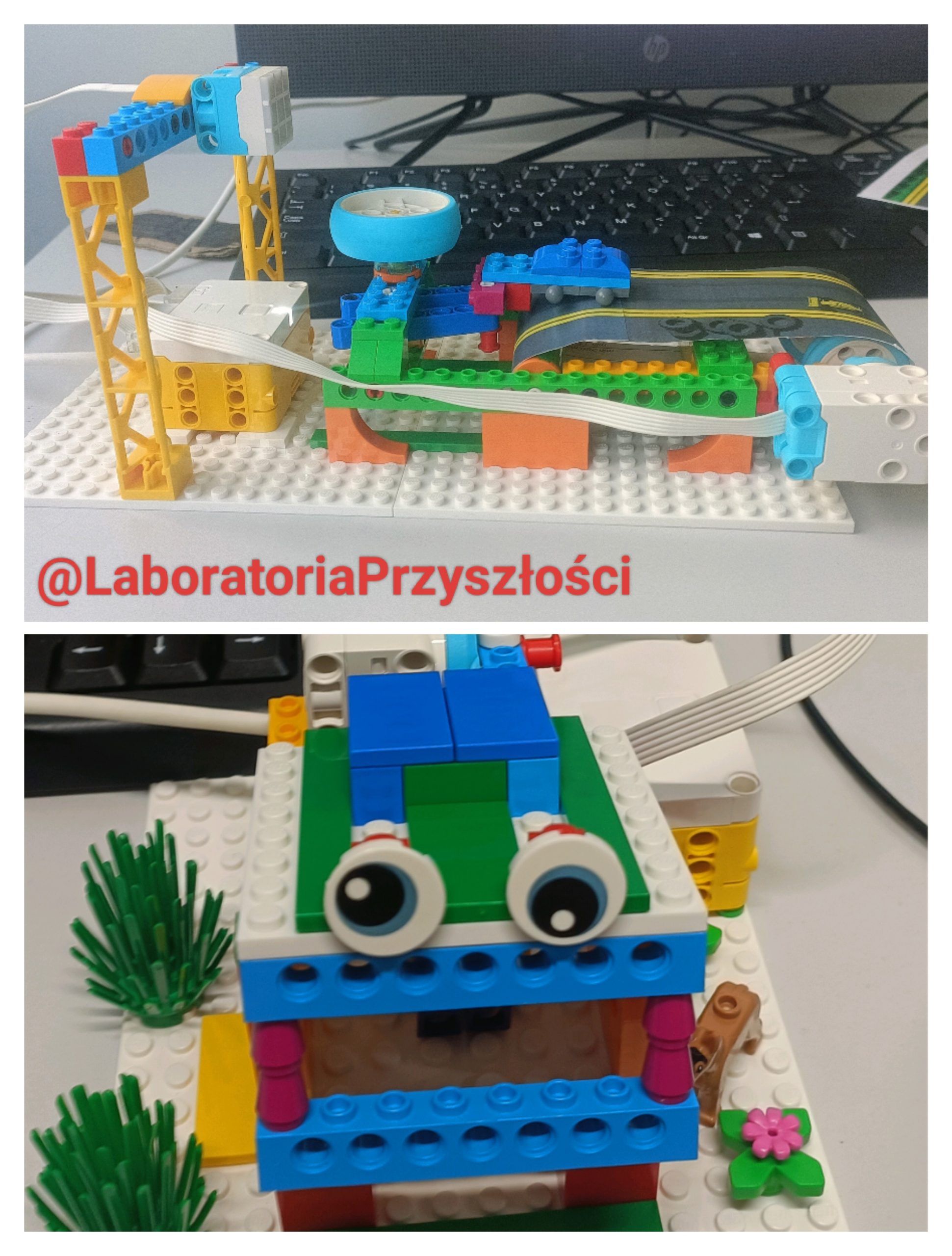
Tor wyścigowy
Bardzo trudny projekt, ale nie dla trzecioklasistów, którzy sprawnie poradzili sobie z tym wyzwaniem. Zbudowali model stymulatora wyścigów. Wykorzystali trzy elementy elektroniczne: HUB, silnik oraz matrycę LED. Program dla toru wyścigowego wprawił w ruch taśmę, którą wcześniej uczniowie zamontowali.
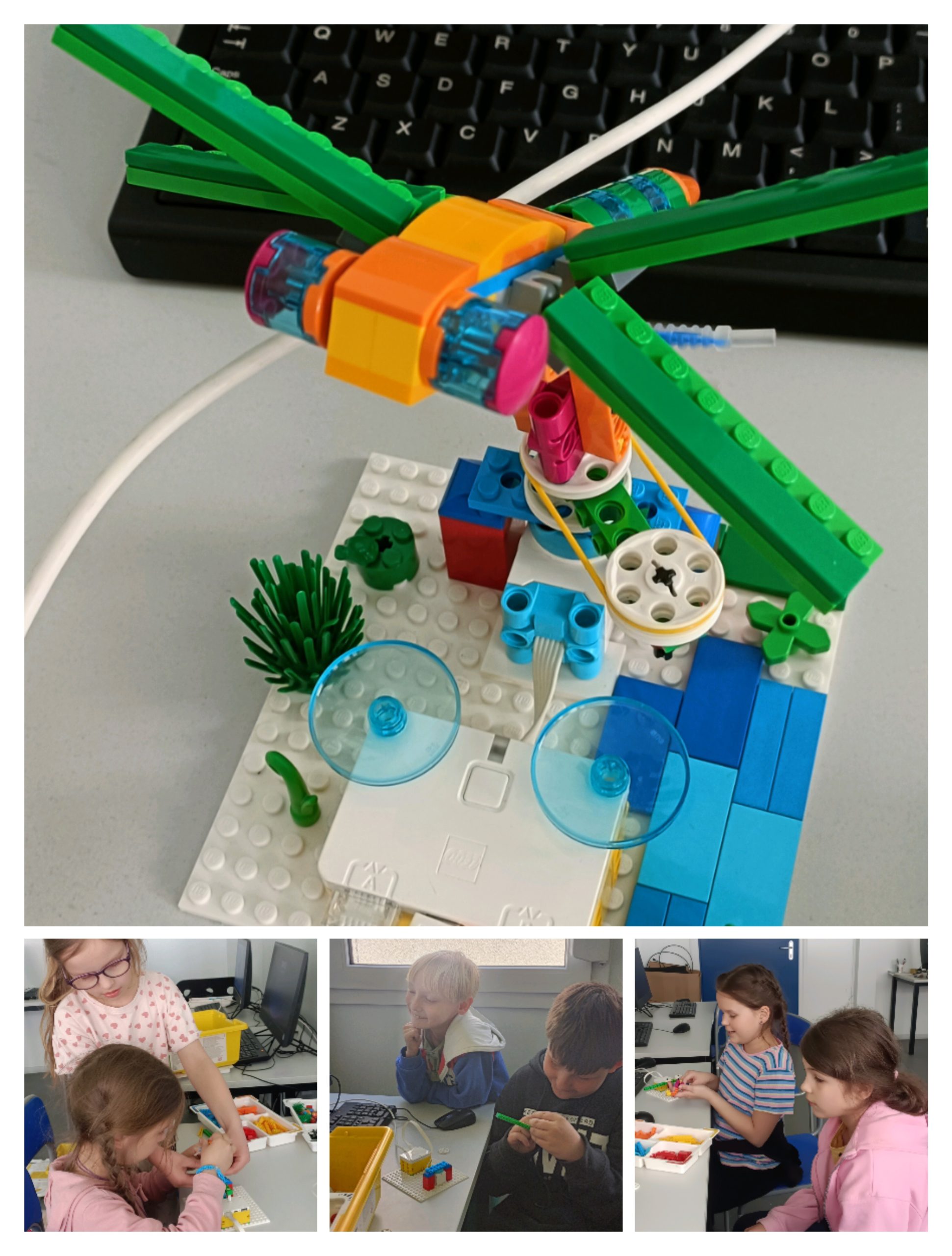
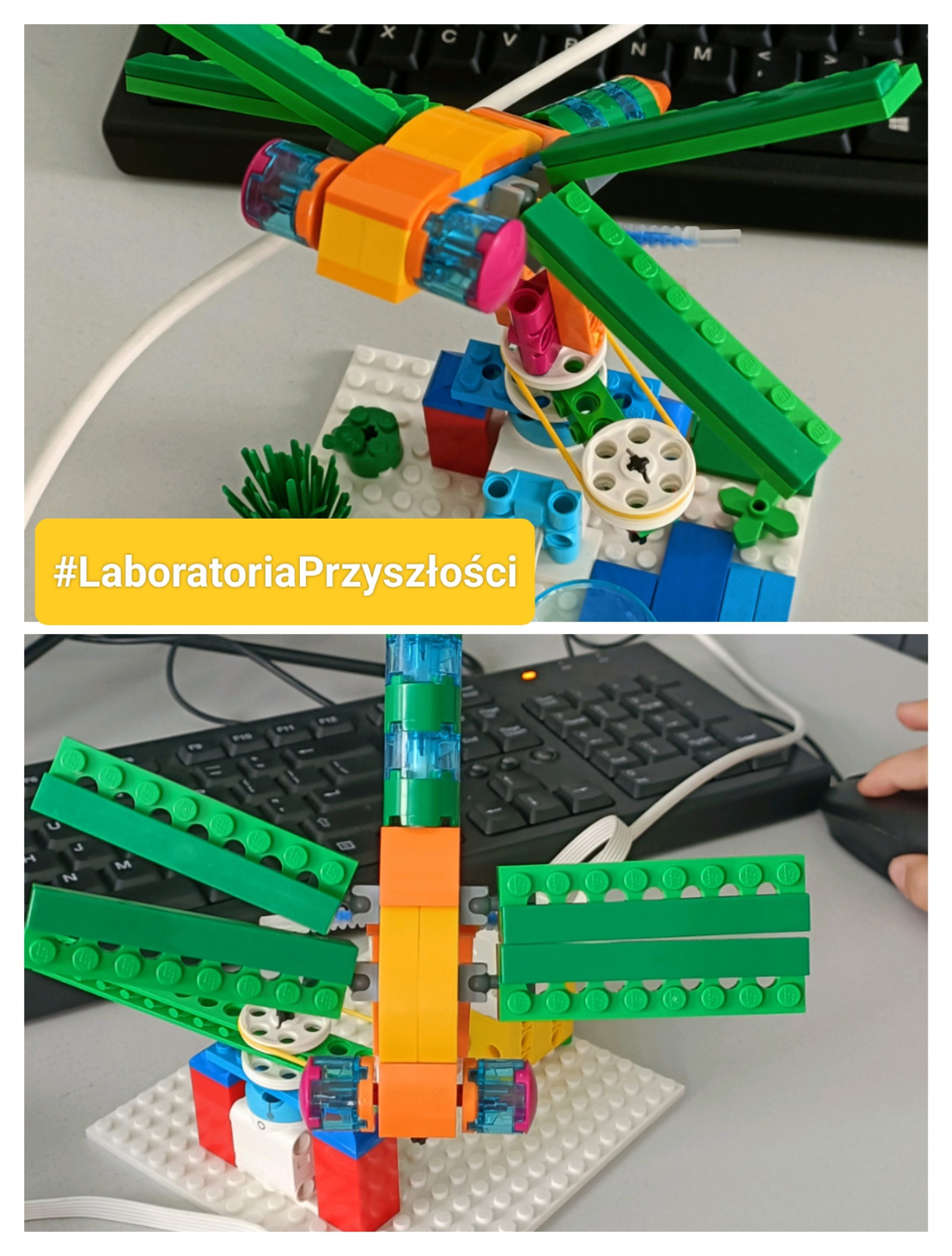
Ważka
Zbudowanie własnej robotycznej ważki i zaprogramowanie jej chaotycznego lotu było nie lada wyzwaniem, ale wszyscy świetnie sobie z tym projektem poradzili.
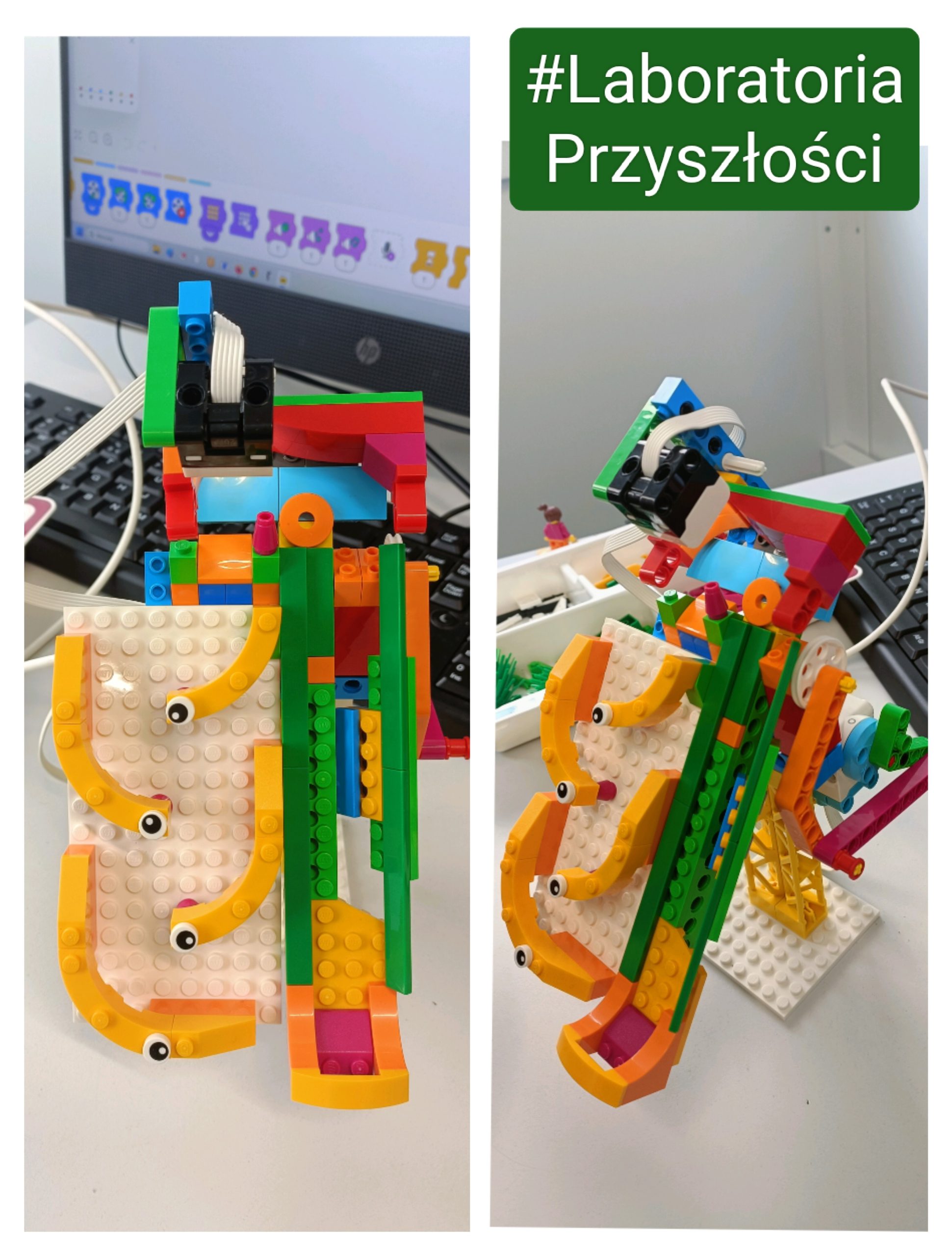
Koń
Uczniowie poznali na podstawie realizacji tego projektu zawiłości tłoków. Mogli zaprogramować różne prędkości.
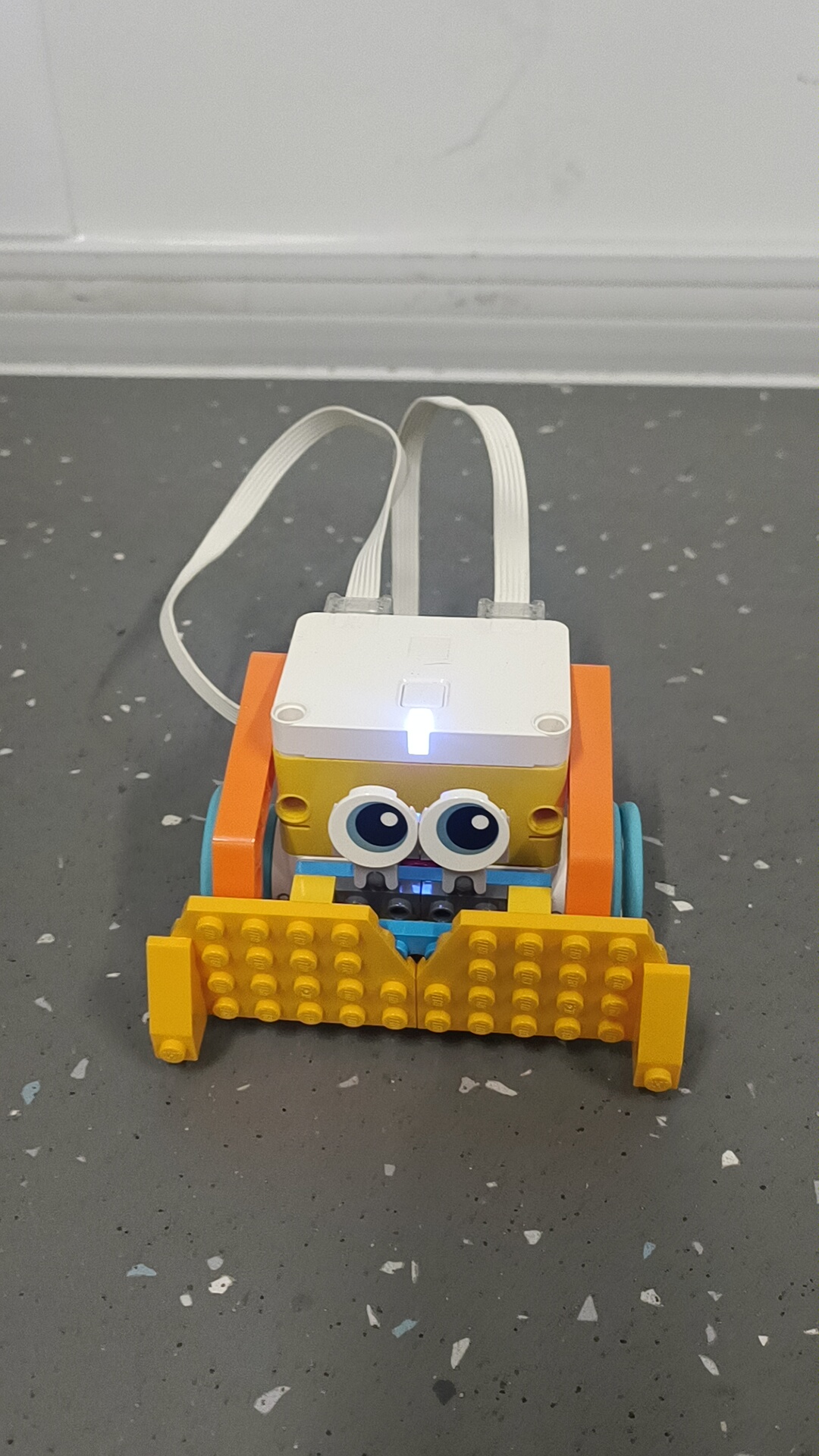
Mini spycharka
Przy tym projekcie było dużo emocji. Wszystkie spycharki wzięły udział w wyścigach. Niektóre jeździły do przodu inne do tyłu, wolno lub szybko. Ważne podczas budowania było włożenie wtyczki silnika do odpowiedniego portu. Podczas programowania ruchu mini spycharki ważne było określenie prędkości jazdy.
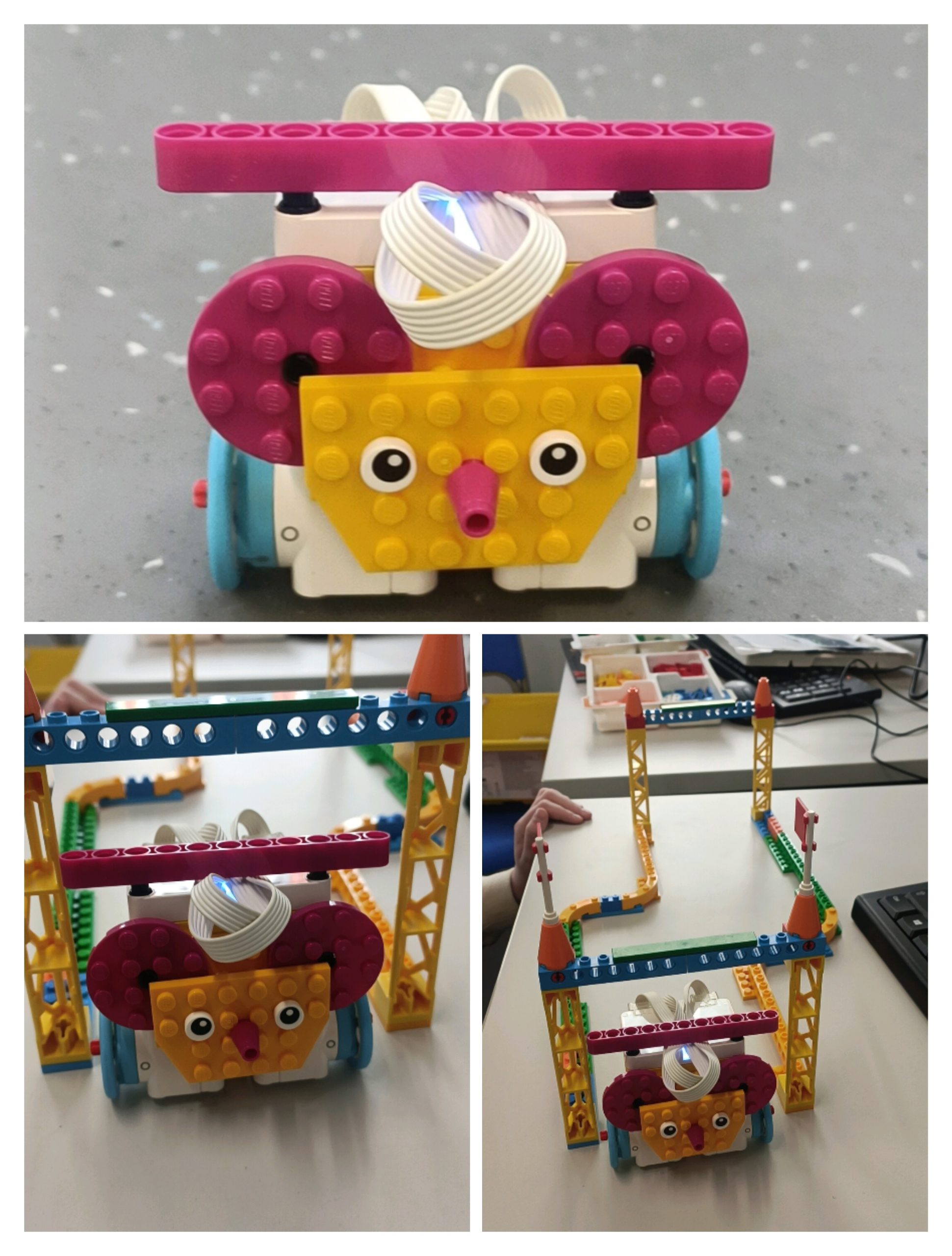
Goryl
Tę uroczą małpkę uczniowie zaprogramowali wykorzystując czujnik wychylenia. Uczniowie zauważyli, że goryl poruszał się w momencie przechylenia HUB-a, który wyposażony jest w żyroskop.
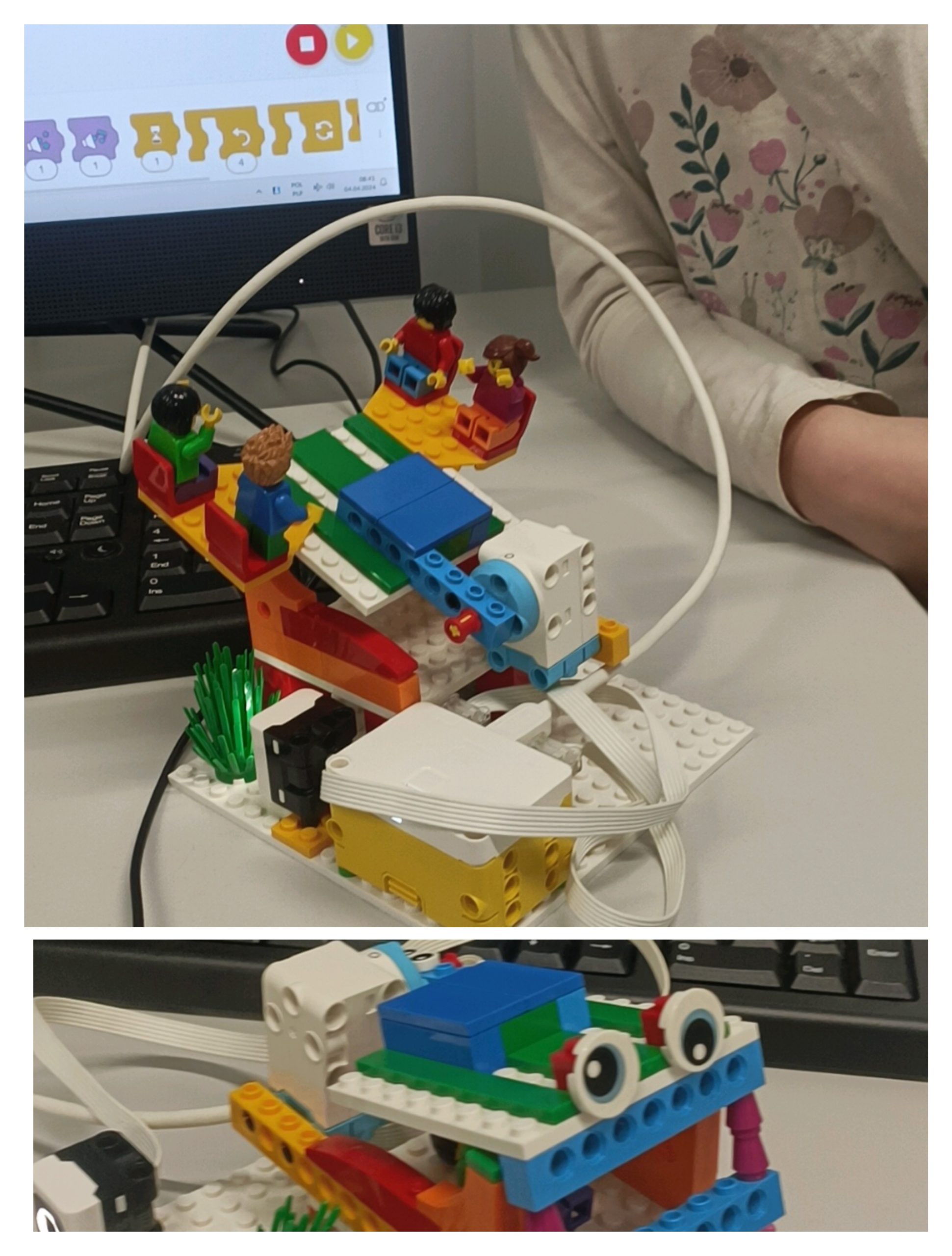
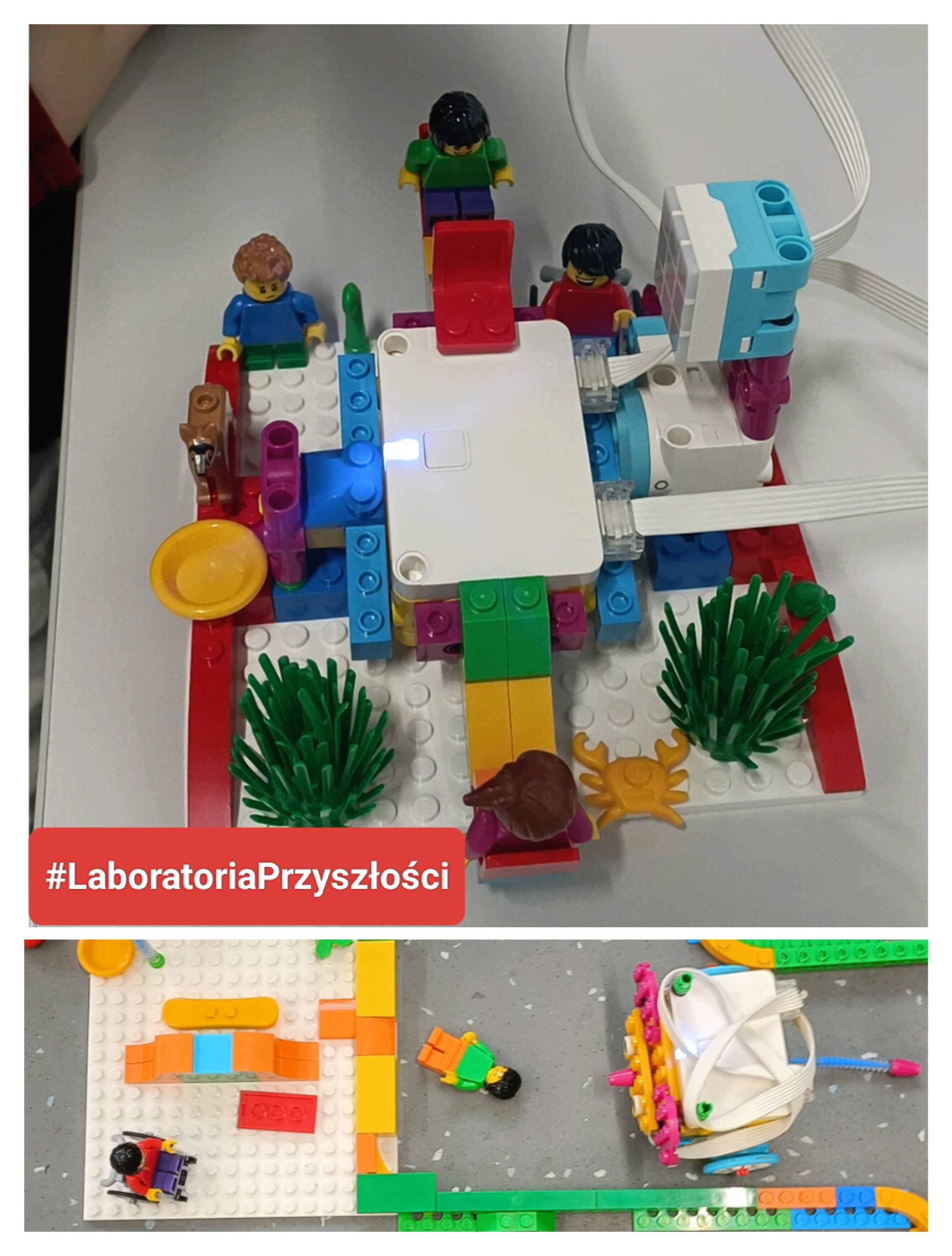
Karuzela
Każdy z uczniów miał możliwość przetestować różne prędkości karuzeli. Wykorzystali w tym projekcie czujnik kolorów, który odczytywał kolor. Jego odczyty służyły do regulowania prędkości silnika.
Sortownik
Zamiast marnować przerwę uczniowie posortowali klocki efektywnie razem z pomocnym sortownikiem?
Przenośnik
Konstrukcja bardzo złożona. Jak dotąd najtrudniejszy projekt. Zadaniem programu dla Przenośnika było podnoszenie ramienia podajnika w celu załadowania kulki do komory, a następnie jego opuszczenie i złapanie kulki po wylocie z komory.